simpleLc
Fast to deploy and lightweight indoor localization technology using advanced sensor fusion. Runs solely on a smartphone.
Whether a smart home system that behaves according to the room we are in, a museum that uses augmented reality for a guided tour, or a traveller wanting to find the fastest route inside an airport - everything is made possible by knowing ones location inside a building.
Our novel optimization scheme enables to omit time-consuming calibrations and reduces the set up to less then 3 hours for a 2500 m² building. No fingerprinting, no robots, or other costly measures like laser scanners are involved. Based on existing Wi-Fi infrastructure given in most buildings and pedestrian dead reckoning . To expand an infrastructure or to create a completely independent one, we offer cheap plug and play Wi-Fi beacons.
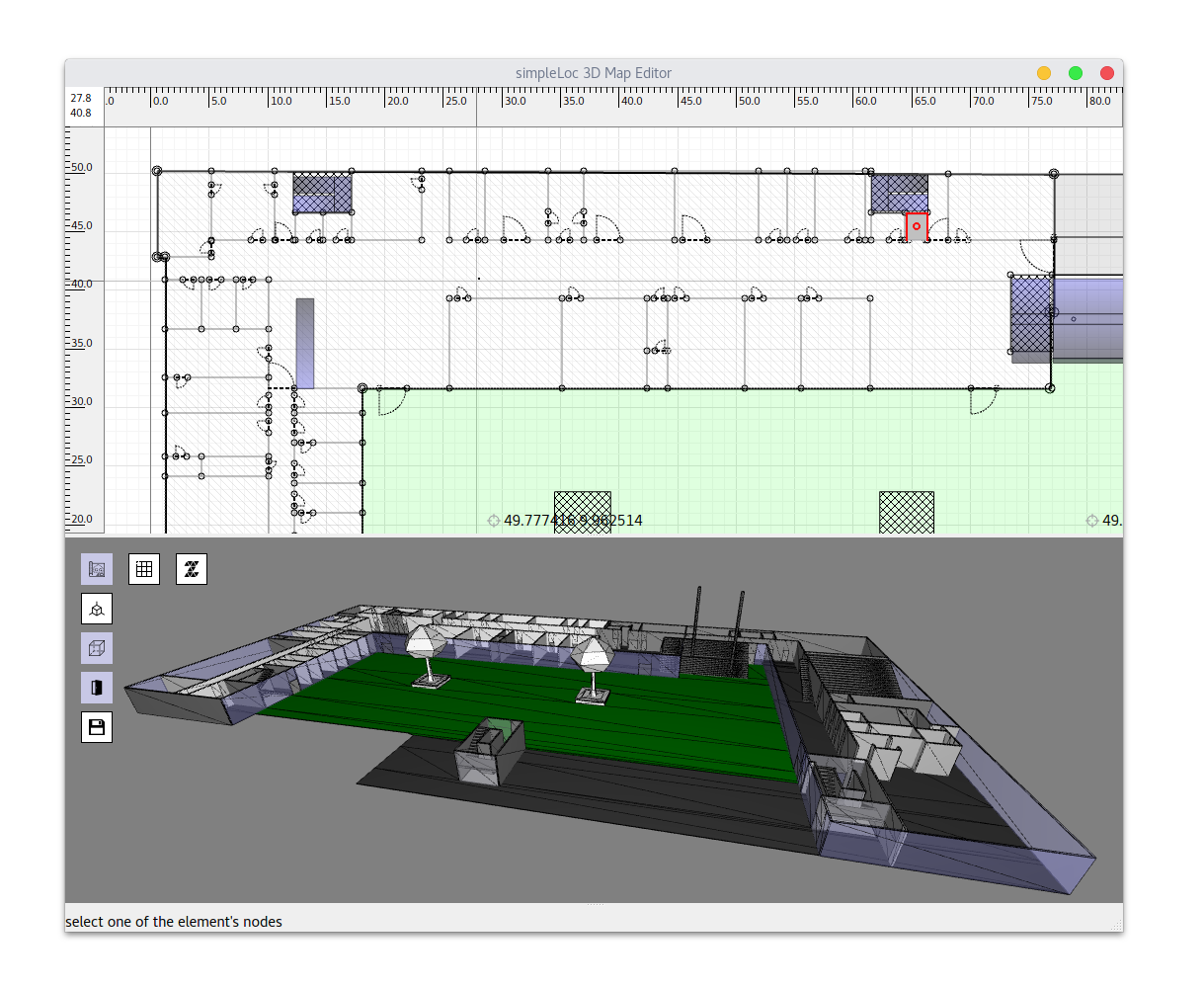
Localization requires maps and thus we created a feature-rich map editor, running on all modern operating systems including tablets. The editor is able to add points of interest (POIs), outdoor areas, 3D-objects, materials, and many more. It includes automatic creation of 3D building models as well as navigation meshes for realistic walking paths.
The topic of localization and navigation is not only a question of accuracy. Other, more practical factors, are playing an important role for technological success. Thus, simpleLoc was also developed to meet such requirements.
Less then 3 hours setup time. No knowledge of access points is needed. Only a floor plan and a few reference measurements.
Very small map sizes (~1 mb) due to our navigation mesh technology. Including meta-information like POIs and paths.
Works seamless with existing Wi-Fi infrastructure. Expandable with cheap (~10 €) plug and play Wi-Fi beacons. No batteries.
No Wi-Fi connection, cloud or server needed. Running solely on standard commercial smartphones.
High performance C++ implementation. Fast processing for real-time localization.
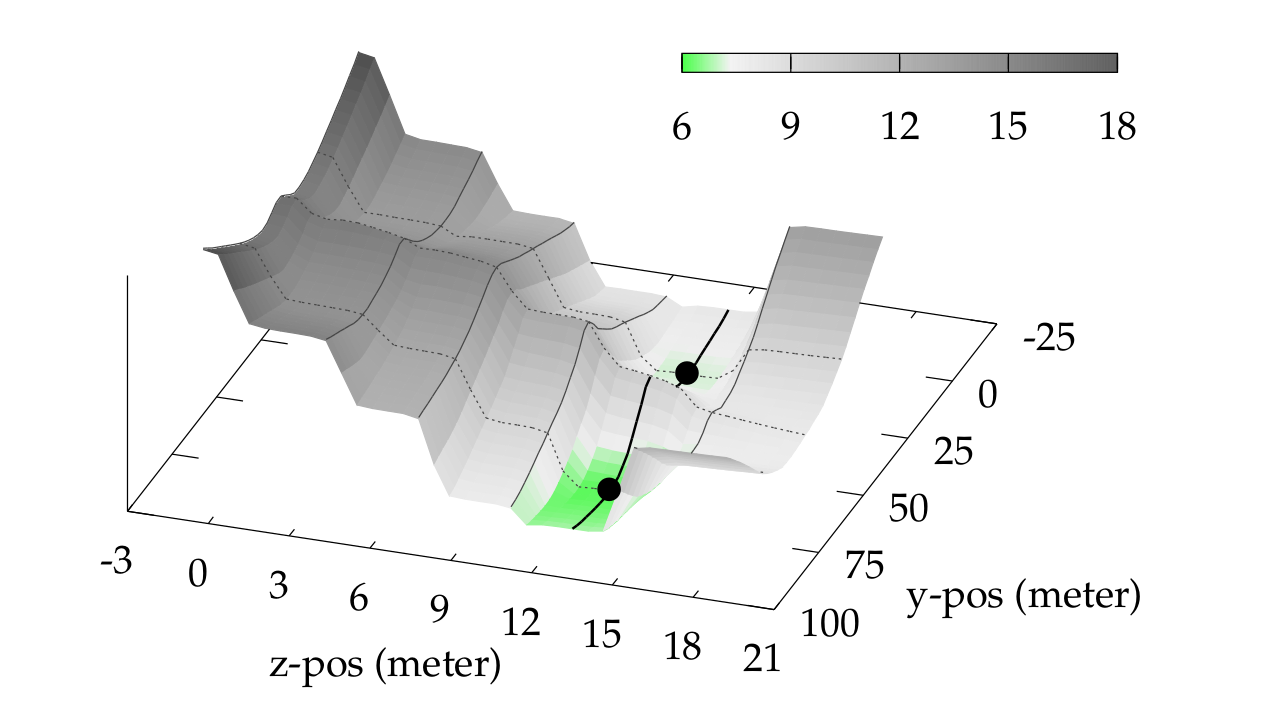
Able to handle sensor downtimes and Wi-Fi dead spots. Resolving impoverishment and multimodal densities.
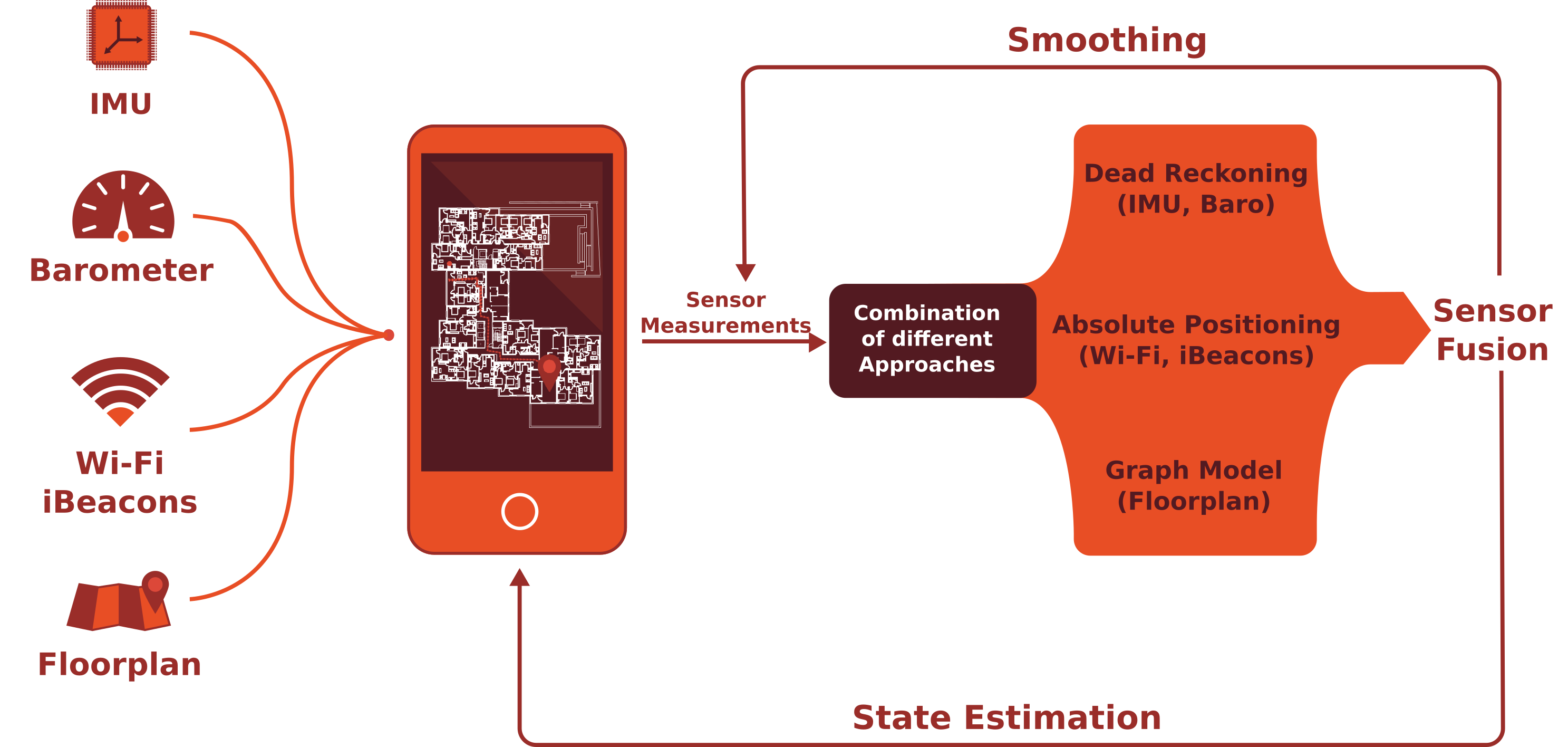
simpleLoc is based on leading sensor fusion technology using a combination of particle filtering and machine learning. Since research started in early 2013, we developed many novel approaches and methods to further improve our system.
| 2023 | EvAAL Indoor Localization Competition Winner of "Track 1 Smartphone (on-site)" and "Track 3 Smartphone (off-site online) [ Link ] |
| 2022 | Editor’s Choice Article – MDPI Sensors Journal, 2020, Volume 20, Issue 16, 4515 [ Link ] |
| 2019 | Project - FabulApp Indoor Module. Indoor localization with area triggers as cross-platform library. [ Link ] |
| 2018 | Project - NaWü, Smart City Würzburg. Indoor localization and navigation for Würzburg city hall. [ Link ] |
| 2017 | Journal Cover - International Journal of Geo-Information (ISPRS) [ Link ] |
| 2016 | FBTI Award of Excellence for outstanding Master's thesis [ Link ] |
| 2016 | EvAAL Indoor Localization Competition Winner of "Track 1: Smartphone-based" [ Link ] |
| 2015 | Best Overall Paper Award - International Conference on Indoor Positioning and Indoor Navigation (IPIN) [ Link ] |
| [19] | Toni Fetzer, Markus Bullmann, Markus Ebner, Steffen Kastner, Frank Deinzer and Marcin Grzegorzek. Interacting Multiple Model Particle Filter for Indoor Positioning Applications In International Technical Meeting of The Institute of Navigation, Long Beach, California, January 2023. IEEE. [ DOI ] |
| [18] | Toni Fetzer, Frank Ebner, Frank Deinzer and Marcin Grzegorzek. Using Barometer for Floor Assignation within Statistical Indoor Localization Sensors, 23(80), 2023. [ DOI ] |
| [17] | Steffen Kastner, Markus Ebner, Markus Bullmann, Toni Fetzer, Frank Deinzer and Marcin Grzegorzek. Magnetic Signature Sensor Model for Accurate Short-Distance Localization In IEEE Sensors, International Conference on, Dallas, Texas, October 2022. IEEE. [ DOI ] |
| [16] | Toni Fetzer, Julian Maier, Markus Ebner, Markus Bullmann and Frank Deinzer. Digitales Spaghetti-Diagramm zur Laufweganalyse wt Werkstattstechnik online, 10/2022(112), 2022 [ DOI ] |
| [15] | Markus Ebner, Toni Fetzer, Markus Bullmann, Steffen Kastner, Frank Deinzer and Marcin Grzegorzek. PIPF: Proposal-Interpolating Particle Filter In Indoor Positioning and Indoor Navigation (IPIN), International Conference on, Bejing, China, September 2022. IEEE. [ DOI ] |
| [14] | Markus Bullmann, Toni Fetzer, Markus Ebner, Steffen Kastner, Frank Deinzer and Marcin Grzegorzek. Data Driven Sensor Model for Wi-Fi Fine Timing Measurement In Indoor Positioning and Indoor Navigation (IPIN), International Conference on, Bejing, China, September 2022. IEEE. [ DOI ] |
| [13] | Markus Ebner, Toni Fetzer, Markus Bullmann, Frank Deinzer and Marcin Grzegorzek. Recognition of Typical Locomotion Activities Based on the Sensor Data of a Smartphone in Pocket or Hand Sensors, 20(22):6559, 2020. [ DOI ] |
| [12] | Markus Bullmann, Toni Fetzer, Frank Ebner, Markus Ebner, Frank Deinzer and Marcin Grzegorzek. Comparison of 2.4 GHz WiFi FTM- and RSSI-Based Indoor Positioning Methods in Realistic Scenarios Sensors, 20(16):4515, 2020. [ DOI ] |
| [11] | Toni Fetzer, Frank Ebner, Markus Bullmann, Marcin Grzegorzek, and Frank Deinzer. Smartphone-Based Indoor Localization within a 13th Century Historic Building. Sensors, 18(12):4095, 2018. [ DOI ] |
| [10] | Markus Bullmann, Toni Fetzer, Frank Ebner, Marcin Grzegorzek, and Frank Deinzer. Fast Kernel Density Estimation using Gaussian Filter Approximation. In Information Fusion (FUSION), 21th International Conference on, Cambridge, United Kingdom, July 2018. [ DOI ] |
| [9] | Toni Fetzer, Frank Ebner, Frank Deinzer, and Marcin Grzegorzek. Recovering from Sample Impoverishment in Context of Indoor Localisation. In Indoor Positioning and Indoor Navigation (IPIN), International Conference on, Sapporo, Japan, September 2017. IEEE. [ DOI ] |
| [8] | Frank Ebner, Toni Fetzer, Frank Deinzer, and Marcin Grzegorzek. On Wi-Fi Model Optimizations for Smartphone-Based Indoor Localization. ISPRS International Journal of Geo-Information, 6(8), August 2017. [ DOI ] |
| [7] | Joaquín Torres-Sospedra, Antonio R Jiménez, Stefan Knauth, Adriano Moreira, Yair Beer, Toni Fetzer, Viet-Cuong Ta, Raul Montoliu, Fernando Seco, Germán M Mendoza-Silva, et al. The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work. Sensors, 17(3):557, 2017. [ DOI ] |
| [6] | Toni Fetzer, Frank Ebner, Lukas Köping, Marcin Grzegorzek, and Frank Deinzer. On Monte Carlo Smoothing in Multi Sensor Indoor Localisation. In Indoor Positioning and Indoor Navigation (IPIN), International Conference on, Alcala de Henares, Spain, November 2016. IEEE. [ DOI ] |
| [5] | Frank Ebner, Toni Fetzer, Marcin Grzegorzek, and Frank Deinzer. On Prior Navigation Knowledge in Multi Sensor Indoor Localisation. In Information Fusion (FUSION), 19th International Conference on, pages 557-564, Heidelberg, Germany, July 2016. IEEE. [ DOI ] |
| [4] | Frank Ebner, Toni Fetzer, Lukas Köping, Marcin Grzegorzek, and Frank Deinzer. Multi Sensor 3D Indoor Localisation. In Indoor Positioning and Indoor Navigation (IPIN), International Conference on, Banff, Canada, December 2015. IEEE. [ DOI ] |
| [3] | Toni Fetzer, Christian Petry, Frank Deinzer, and Karsten Huffstadt. 3D interaction design: Increasing the stimulus-response correspondence by using stereoscopic vision. In Automatic Face and Gesture Recognition (FG), 11th IEEE International Conference and Workshops on. IEEE, July 2015. [ DOI ] |
| [2] | Toni Fetzer, Frank Deinzer, Lukas Köping, and Marcin Grzegorzek. Statistical Indoor Localization Using Fusion of Depth-Images and Step Detection. In Indoor Positioning and Indoor Navigation (IPIN), International Conference on, Busan, South Korea, September 2014. IEEE. [ DOI ] |
| [1] | Frank Ebner, Frank Deinzer, Lukas Köping, and Marcin Grzegorzek. Robust Self-Localization using Wi-Fi, Step/Turn-Detection and Recursive Density Estimation. In Indoor Positioning and Indoor Navigation (IPIN), International Conference on, Busan, South Korea, September 2014. IEEE. [ DOI ] |
With simpleLoc we provide a scalable, fast and easy to use indoor localization and navigation solution. If your are interested, please contact us for a live presentation at your building. We also offer research and development services as well as technology transfer in the area of sensor fusion, machine learning and computer vision.
